Zu Beginn gleich mal eine wichtige Klarstellung zur Arduino-RC:
der Entwurf dieser Fernsteuerung auf Arduino-Basis für ein Kamera-Rig stammt nicht von mir, ich habe sie lediglich nachgebaut!
Inspiriert durch einen Beitrag von David Wheeler im amerikanischen Luftbildforum, in dem er seine Version einer überarbeiteten Rig-Fernsteuerung vorstellt, habe ich beschlossen, mich an diesem kleinen und für den Wiesen-/Strandeinsatz scheinbar bestens geeignetem Bediengerät zu versuchen. Zum Glück liefert David eine ausgezeichnete Dokumentation seiner Arbeit inclusive aller verwendeten Bauteile, Bezugsquellen und Programme. Vielen Dank dafür und natürlich für seine großartige Arbeit, die in diesem Projekt steckt.
Bilder
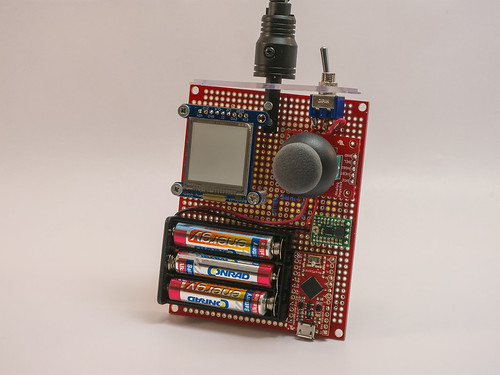
Im Mittelpunkt der Fernbedienung steht der Arduino-Prozessor, genauer gesagt ein Arduino Pro Micro – 5V/16MHz, der dem Fernsteuerungsmodul die PPM-Signale liefert, über die die Servo-Positionen definiert werden. Der Bediener kontrolliert das System mittels einer Benutzeroberfläche bestehend aus Daumen-Joystick und LCD-Display.
System-Komponenten der Arduino-RC
Das Fernsteuerungssystem besitzt einen Arduino Pro Micro-Prozessor, einen Daumen-Joystick als Bedienerschnittstelle und einen LCD-Bildschirm zur Info-Ausgabe. Die Signale werden vom Sendemodul einer Hobbyking 2,4 GHz-Fernsteuerung (HK-T6A) übertragen. Ein Ein/Aus-Schalter, ein Spannungsregulator und ein Satz-AAA-Batterien sorgen für die Spannungsversorgung.
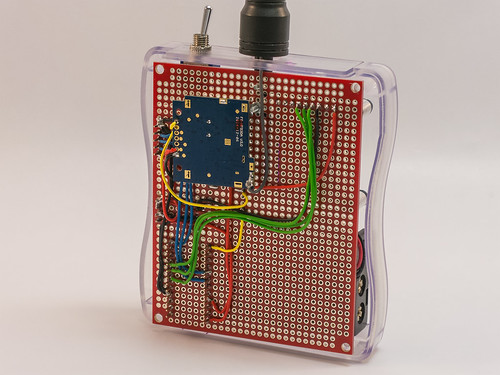
Der Arduino Pro-Micro von Sparkfun basiert auf dem ATmega32U4, er ist ziemlich klein, was ihn attraktiver für dieses Projekt macht als den Standard-Arduino.
Die dedizierten Timer dieses Prozessors generieren ein PPM-Signal. Und die anderen Anschlüsse und Funktionen passen ebenfalls perfekt zu diesem Projekt.
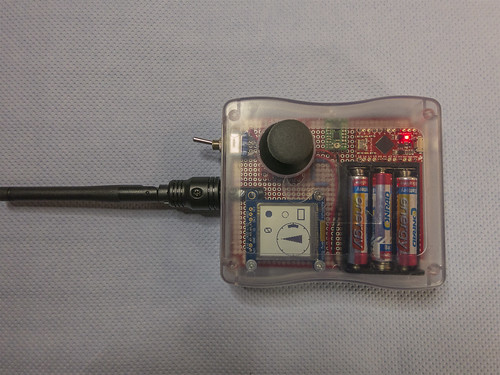
Er verarbeitet die Eingaben, die er über einen Daumen-Joystick als Bedienerschnittstelle bekommt, gibt die Servobefehle über das 2,4 Ghz-Sendemodul weiter und liefert die Daten für die entsprechende Anzeige auf dem LCD-Modul, die die Kamerastellung schematisch darstellt. Es liefert eine visuelle Rückmeldung der PAN- und TILT-Einstellungen, und es zeigt außerdem den Aufnahme-Modus, den Auslösestatus und die horizontale/vertikale sowie die automatische/manuelle Einstellung an.
Weiterhin übernimmt der Arduino die Verschlusskontrolle der Kamera: auch hierzu dient der Daumen-Joystick auf dem Bediengerät. Jedes Mal wenn der Bediener den Joystick-Knopf drückt, wird ein Signal ausgelöst. Dieses Signal kann verzögert werden, wenn sich die Rig in Bewegung befindet. Der Arduino wartet mit dem Kamera-Auslösesignal bis die vorausgehende Bewegung abgeschlossen ist und eine kurze Stabilisierungsphase durchlaufen wurde.
Das Sendemodul habe ich aus einer Hobby King Fernsteuerung ausgebaut.
Die Spannungsversorgung übernehmen 3 AAA-Batterien, die nominell 4,5 Volt liefern und das Fernsteuer-Sendemodul direkt versorgen. (Dieses besitzt seinen eigenen 3,3 V LDO-Spannungsregler, so dass die VCC-Spannung irgendeinen Wert, der größer ist als 4 Volt, aufweisen kann.) Die 3 AAA-Batterien beliefern aber auch einen Pololu Spannungsregler, der die 6V-Spannung für den Arduino generiert. Der Arduino-eigene Regler reduziert die Spannung auf 5 Volt für den ATmega. Auch das LCD-Display und der Joystick werden mit diesen 5 Volt versorgt.
Detailiertere Erläuterungen findet der interessierte Leser auf den oben aufgeführten Seiten.
Sollten Fragen nach europäischen Bezugsquellen oder Preisen der verbauten Teile bestehen, einfach eine mail an mich.
Baubeschreibung Arduino-RC
Gehäuse mit Deckel
Platine
LCD-Display
Joystick
Arduino
Spannungsregler
Sendemodul mit Antenne
Ein-/Aus-Schalter
Kabel und Stecker