Servo Controller steuern automatisch sämtliche Servos an einer Rig ohne auf eine RC Steuerung angewiesen zu sein. Die beiden folgenden Controller habe ich bisher ausprobiert und bin mit beiden sehr zufrieden.
Pololu Micro Maestro
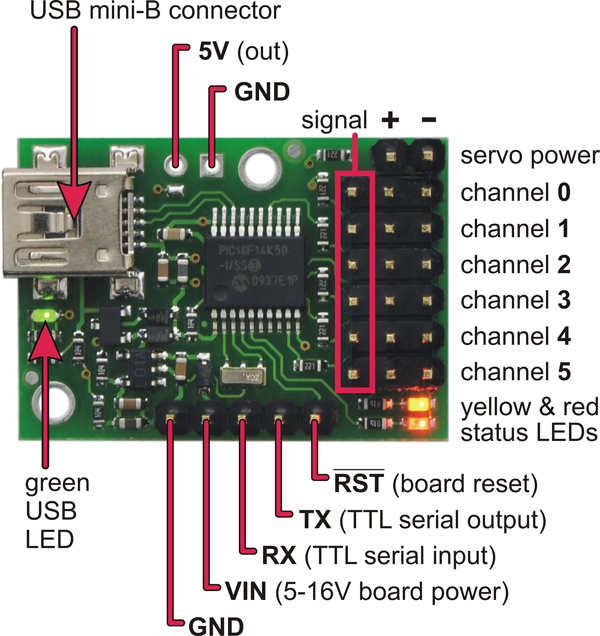
Hierbei handelt es sich um den kleinsten Servo Controller aus Pololus zweiter Generation von Servocontrollern. Die neue Generation bietet mehr Ausgänge auf weniger Raum.
Die Controller lassen sich direkt über USB mit einem Rechner verbinden, für den Einsatz an einem Mikrocontroller steht eine serielle Schnittstelle (TTL) zur Verfügung.
Hauptmerkmale
- Drei Kontrollmethoden: USB, TTL (5V) seriell, und internes Skript
- 0.25μs Ausgangsimpulsbreitenauflösung (entspricht etwa 0.025 ° für einen typischen Servo, was höher als die Servoauflösung ist)
- Pulsrate konfigurierbar zwischen 33-100 Hz
- Pulsbereichsbreite von 64 bis 3280 μs
- Individuelle Beschleunigungs- und Geschwindigkeitskontrolle für jeden Kanal
- Die Kanäle können wahlweise so konfiguriert werden, dass sie eine bestimmte Position anfahren, oder bei der Inbetriebnahme oder einem Fehler abschalten
- Die Kanäle können auch als Mehrzweck-Digitalausgänge oder analoge Eingänge verwendet werden
- Eine einfache Skriptsprache erlaubt es Ihnen, die Steuerung für komplexe Aktionen zu programmieren, selbst nachdem USB- und serielle Anschlüsse entfernt wurden
- Umfassendes Benutzer-Handbuch
- Eine freie Konfiguration und die Steuerungsanwendung für Windows macht es einfach:
- den Kontroller zu konfigurieren und zu testen
- Sequenzen von Servobewegungen für Computer-Animationen und Laufroboter zu erstellen, auszuführen und zu speichern
- Skripte zu schreiben, Schritt für Schritt zu durchlaufen und im Servo-Controller gespeicherte Skripte auszuführen
- Zwei Wege, Software zu schreiben, um den Maestro von einem PC aus zu steuern:
- ein virtueller COM-Anschluss macht es einfach, serielle Befehle von jeder Entwicklungsumgebung, die serielle Kommunikation unterstützt, zu senden
- Das Pololu USB Software Development Kit ermöglicht den Einsatz von fortgeschrittenen nativen USB-Befehlen und enthält Beispielcode in C #, Visual Basic .NET und Visual C ++
- seriellen TTL-Funktionen:
- Unterstützt 300-200000 bps im Fest-Baud-Modus, 300 bis 115.200 bps im autodetect-Baud-Modus
- Gleichzeitig unterstützt er das Pololu-Protokoll, das den Zugriff auf erweiterte Funktionen gibt, und das einfachere Scott Edwards MiniSSC II-Protokoll (es gibt keine Notwendigkeit, das Gerät für einen bestimmten Protokoll-Modus zu konfigurieren)
- Kann über eine einzige serielle Sendeleitung mit anderen Pololu Servo- und Motor-Controllern verkettet werden
- Kann als Allzweck-USB-zu-TTL Seriell-Adapter für Projekte fungieren, die von einem PC gesteuert werden
- Die Pololu Maestro Arduino Bibliothek macht es einfacher, damit zu beginnen, einen Maestro-Kontroller von einem Arduino oder kompatiblen Boards wie die Pololu A-Star-Controller zu steuern
- Das Board kann aus einem USB-Anschluss mit Strom versorgt werden oder aus einer 5-16-V-Batterie, weiterhin macht es die geregelten 5V für den Benutzer verfügbar
- Kompakte Größe von 2,16 × 3,05 cm und ein geringes Gewicht von 4,8 g mit Header
- Upgradefähige Firmware
Bezugsquellen für Deutschland (um nur mal eine zu nennen):
Eckstein GmbH
Diesen sechskanaligen Micro Maestro setze ich in der Auto-RIG ein.
AuRiCo von Peter Engels
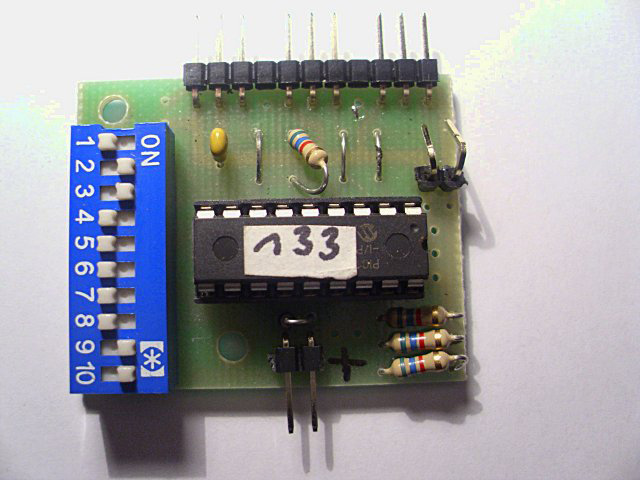
Dieser AutoRigController (AuRiCo) steuert automatisch sämtliche Servos an einer Rig ohne auf eine RC Steuerung angewiesen zu sein.
Verschiedene Dreh-, Neige-, Auslösemodi können eingestellt werden. Die Intervallzeiten sind in weiten Bereichen einstellbar. (2 Sek – 4 Min)
Die Steuerung übernimmt dabei ein programmierter Risc MicroController.
Die Konfiguration geschieht sehr einfach über eine Schalterleiste und ist für jeden ohne Pc bzw. Programmierkenntnisse in kürzester Zeit zu bewerkstelligen. (im Gegensatz zu einigen anderen Autorigcontrollern)
Es werden alle Servos der Systeme Graupner, Futaba & Profi (Conrad) unterstützt. Der Betrieb mit Intervallkameras und auch Kameras mit manueller Auslösung ist möglich.
AuRiCo wird mit 4 AA bzw AAA Zellen versorgt
(Alkaline oder NiCd/NIMH), eine Versorgung über 1 Lipozelle ist ebenfalls möglich (servoabhängig)
Wer mehr über diesen Controller erfahren möchte, kann sich auf der Seite von Peter Engels ja mal umschauen.
Hallo Mirco,
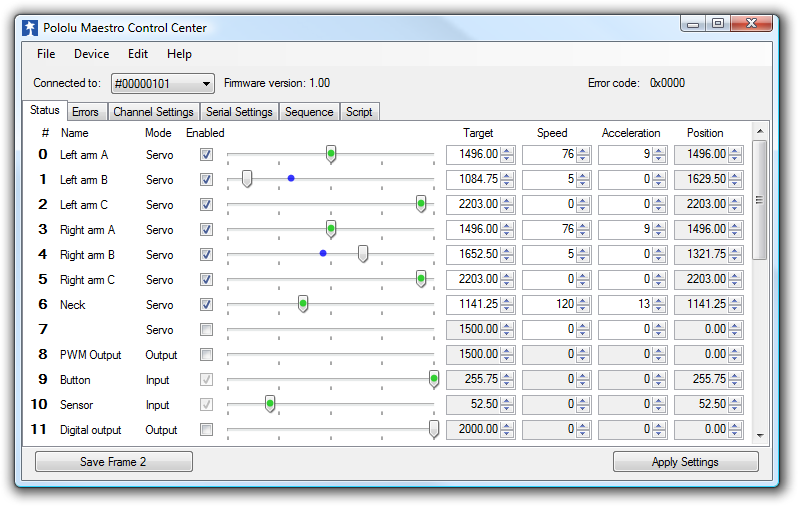
ja, die Erstellung eines Steuerungsprogramms geschieht mittels PC. Dazu ruft man das Maestro Control Center auf, verbindet den Servocontroller über ein USB-Kabel mit dem PC und stellt über Schieberegler die gewünschten Servo-Positionen ein, die dann in einem Programm gespeichert werden.
Das war jetzt eine sehr einfache Darstellung des Vorgehens, tatsächlich ist es aber auch nicht viel schwieriger. Zum Verbinden der Einzelpositionen braucht man zwar eventuell noch ein paar zusätzliche Befehle, die werden im Handbuch aber gut beschrieben.
Gruß
Peter
Hallo,
2 Fragen zum Micro Maestro:
muß der Maestro komplett am PC für die Steuerung des Rigs eingestellt werden?
Wo bekomme ich das Skript & ist es schwierig?
Vielen Dank
Mirco