Ein weiterer Testaufbau: ein RC- und Auto-RIG , bei dem mittels Fernsteuerung zwischen den beiden Bewegungszuständen hin- und hergeschaltet werden kann.
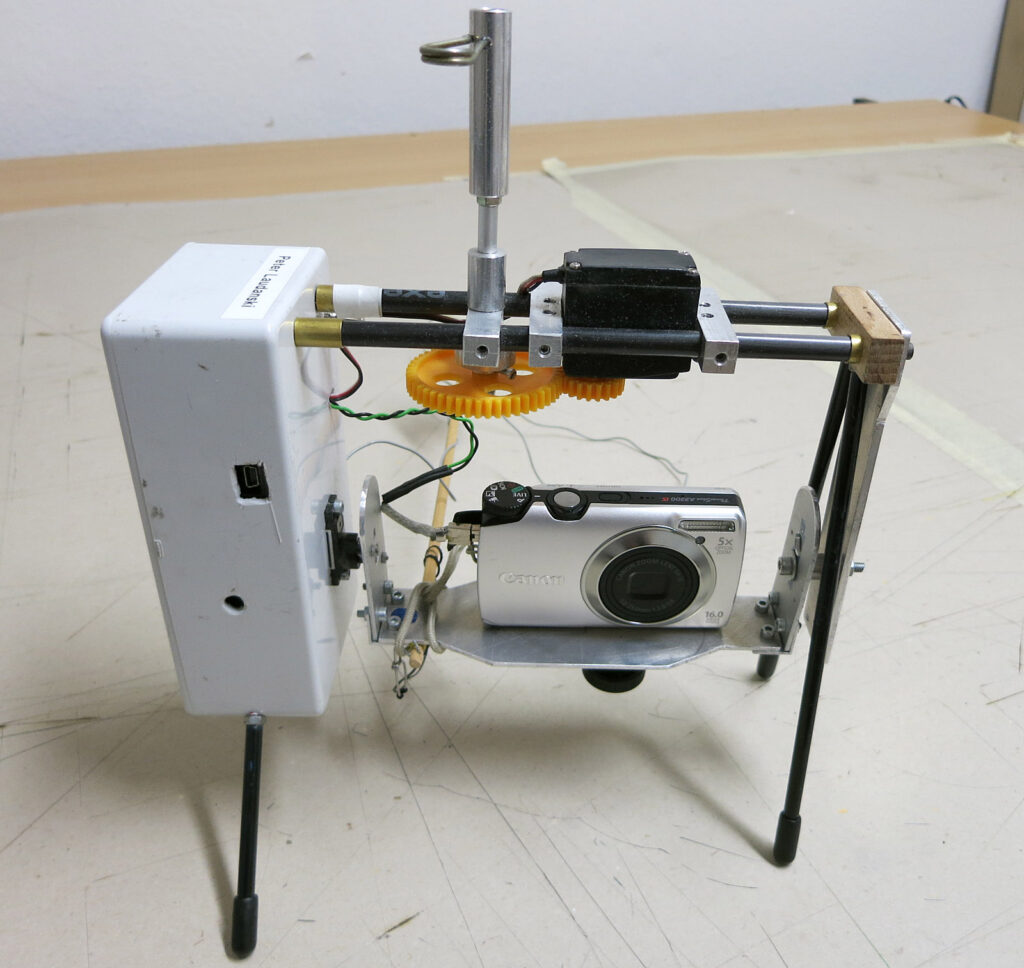
Gewicht ohne Kamera: 572,25 g (+ 16 g für die Kameraschraube)
Diese Rig besteht, wie der Name schon vermuten lässt, aus einer Kombination von automatischer Bewegungs- und Aufnahmesteuerung und einer ferngesteuerten Bewegung/Aufnahme.
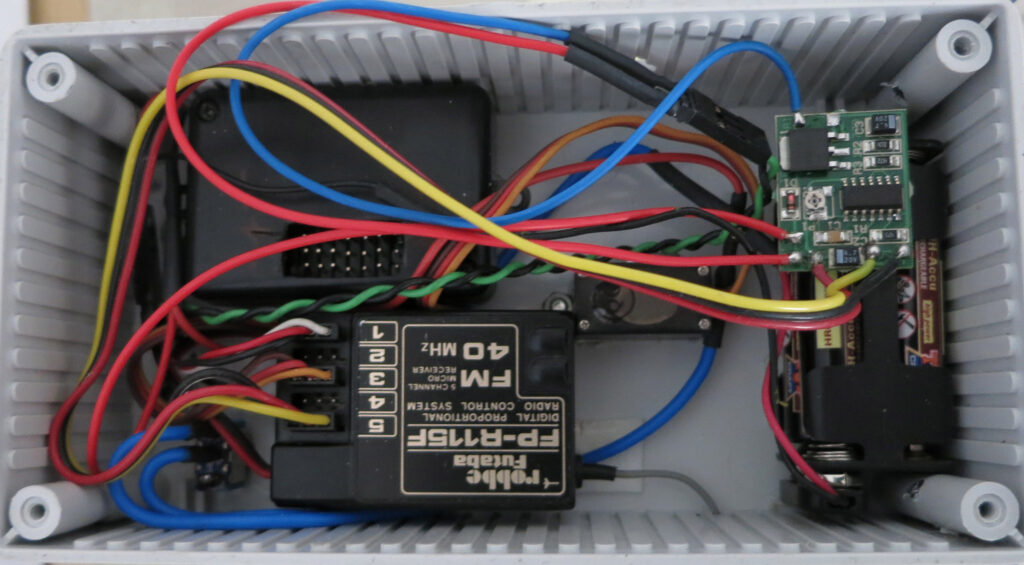
Auch hier verrichtet ein Pololu Maestro Micro Servo Controller mit 6 Kanälen seine Aufgabe für die automatische Kontrollfunktion. Das ausgeführte Programm unterscheidet sich nicht von dem der weiter oben vorgestellten Auto-Rig. Die Ausgänge gehen aber nicht direkt zu den Servos für Pan und Tilt und zum USB-Stecker der Kamera, sondern laufen zu einem Pololu 4-Kanal RC Servo Multiplexer.
Weiterhin besitzt diese Rig ein Empfangsteil einer (alten) 40 Mhz-Fernsteuerung. Die in dieses Empfangsteil eingesteckten Kabel laufen ebenfalls zum Multiplexer.
Der Multiplexer wird nun dazu benutzt, auf Wunsch zwischen diesen beiden voneinander unabhängigen Quellen hin und her zuschalten, indem ein separater Kanal als Eingang benutzt wird.
Funktion
Der RC Multiplexer misst die auf dem mit SEL bezeichneten Eingang eingehende Signale, vergleicht sie mit den Voreinstellungen und entscheidet, ob die Master- (M1-M4) oder die Slave-Eingangssignale (S1-S4) zu den Ausgängen (OUT1-OUT4) weitergegeben werden sollen. Nach Voreinstellung geschieht die Weitergabe an den Slave nur, wenn die Impulslänge von 1700 μs überschritten wird. Nähere Einzelheiten zu diesem Bauteil kann man auf der Webseite von Pololu finden.

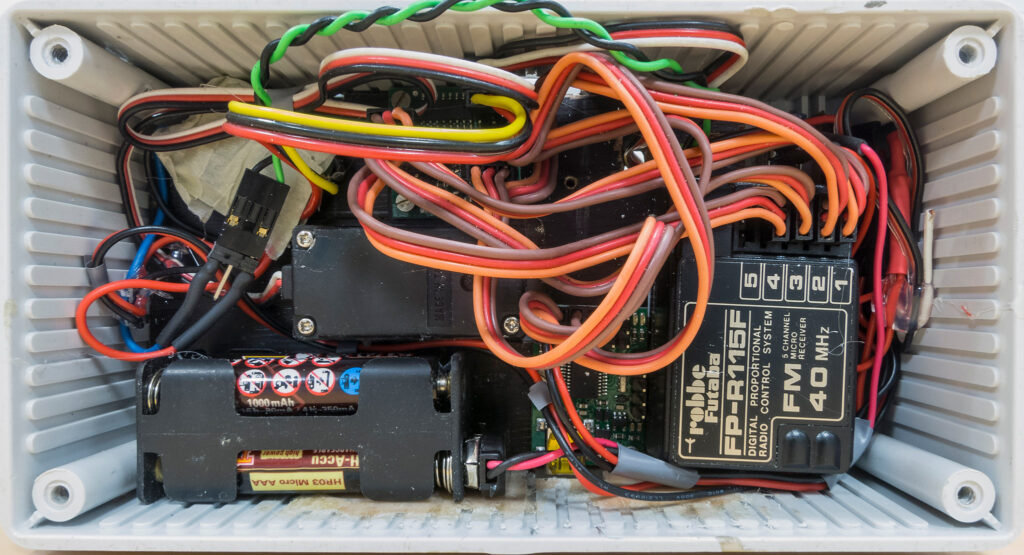
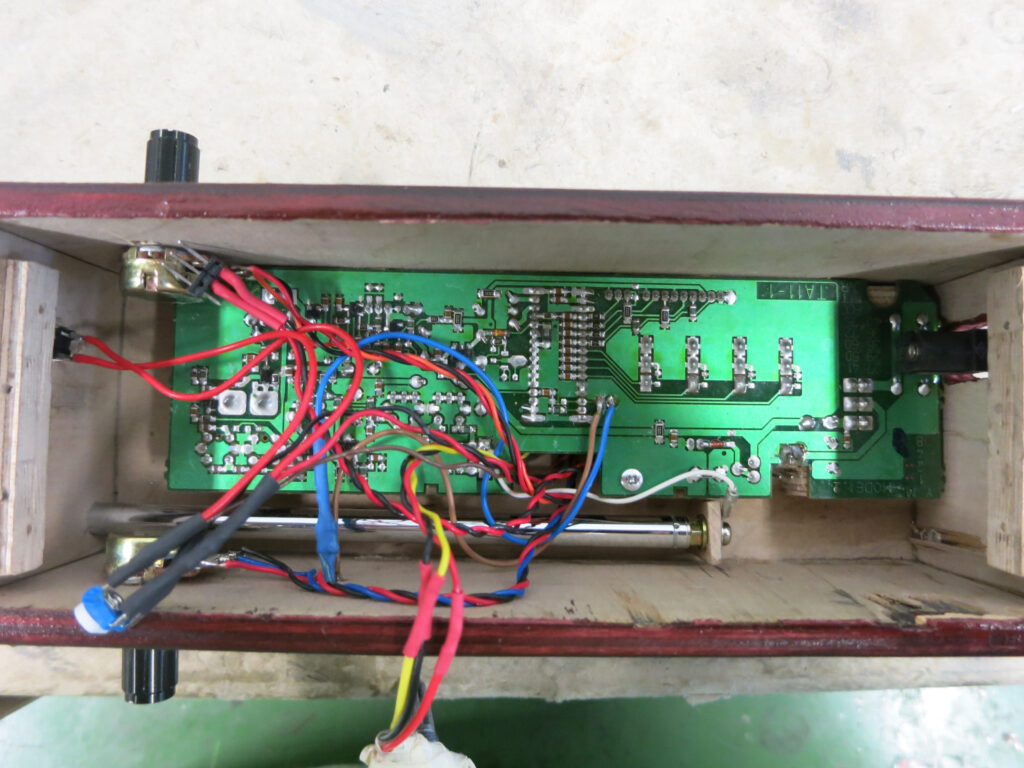
So sieht das Ganze dann aus. Es ist noch etwas unübersichtlich, deshalb auch immer noch im Versuchsstadium 😉
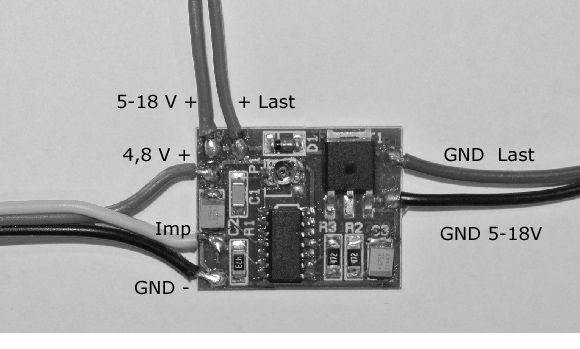
Der SMD-Leistungsschalter dient zum Schalten von Sonderfunktionen im Modellbaubereich, z.B. Scheinwerfer, Blinker, Hupe, Martinshorn, Wasserpumpe usw.
Der Anschluss erfolgt an einen freien Kanal eines Empfängers oder alternativ parallel zu einem Servo. Über ein kleines Einstellpotentiometer kann der Schaltpunkt festgelegt werden.
Hier hat er die Funktion, mit den Impulsen, die entweder vom Maestro-Micro oder dem RC-Empfänger kommen können, die Spannung, die ich für den USB-Anschluss und letztendlich für das CHDK-Signal benötige, zu schalten. Er ist an einen Ausgang des RC-Multiplexers angeschlossen.
Jetzt geht es ans Testen und danach ans Aufräumen innerhalb der Kontrollbox.
Version 2.0
Die Platinen für die Servosteuerung und die Umschaltfunktion sind zusammen mit dem Akkuhalter und dem Empfangsteil auf einer Holzplatte befestigt, die ich komplett aus dem Gehäuse entnehmen kann. Da die Abstände zwischen den Bauteilen nun definiert sind, habe ich einige Kabel auf die richtige Länge gebracht, die Servokabel sind zwar zum Teil immer noch etwas zu lang, aber ich kann will sie wegen der Stecker nicht kürzen. Kurz gesagt,ich habe etwas aufgeräumt.

Weiterhin habe ich das Bediengerät der Fernsteuerung bearbeitet. Nach Bildern aus dem Kap-Forum habe ich die Platinen der Original-Fernsteuerung in ein Holzgehäuse gepackt. Deren Platinen bestimmen die Abmessung des neuen Gehäuses. Die Antenne und 8 AA-Akkus sind dort ebenfalls untergebracht. Die Steuerknüppel wurden durch ein Drehpoti mit großem Stellrad (TILT) und Schalter (SEL/SHOT) bzw. Taster (PAN) ersetzt.
Weitere Bilder folgen
.